 The Autonomous Driving competition constitutes a medium complexity technical challenge in which a mobile, autonomous robot must traverse a route along a closed track which resembles a conventional road.
The Autonomous Driving competition constitutes a medium complexity technical challenge in which a mobile, autonomous robot must traverse a route along a closed track which resembles a conventional road.
The track attempts to replicate a real scenario, but the competition takes place in a structured and controlled environment. The track, with an eight-format, simulates a two-way road with a zebra-crossing, a pair of traffic lights (one in each direction), a tunnel, a working zone, traffic signs, an obstacle and a parking area with one free space and one occupied space. The position of the obstacle on the track and the free place of the parking area are unknown to the robot at the beginning of each run.
The competition has three rounds that take place over three consecutive days, during which complexity is progressively increased through the addition of new challenges. In all three rounds the robots start from the zebra-crossing, after the "go ahead" signal is displayed on the traffic light, and has to complete two laps around the track.
In addition to identifying the traffic light displayed by the panel, the first round only requires movement control of the robot along the track. The robot must complete two laps on the track as fast as possible. In this first round, the tunnel, the obstacle, the working zone and the traffic signs are not present.
The second round requires the robot to identify one of five different signals displayed by the dashboard light (simulating the traffic lights) and to react accordingly. The signs, shown through a TFT 17" screen, may indicate that the robot must stop, move towards one of two possible directions (left or straight ahead), that the race has ended or that it should initiate the parking maneuver. In the second round, robots must also avoid an obstacle, which is obstructing one of the ways in an unknown location. The obstacle must be detected and the robot must avoid it by following the track, without leaving it.
Finally, in the third round, two additional challenges are included: a tunnel, that covers part of the course, and a non-structured part of track called 'working zone'. The tunnel has significant impact in light conditions, therefore requiring a shift in the navigation style of the robot. The working zone imposes a different route that is unknown a priori. The new route is marked by colored cones (orange and white, similar to traffic cones but smaller), connected through a red/white plastic strip. In this area, the robot must leave the normal track and follow the new path, without touching any of the elements that bounds it, and re-enter the track area where the working zone ends.
Since 2011, a simplified variant of the competition was introduced, which is called ROOKIE CLASS. This version of the competition includes two phases:
The first phase is a simple speed test - the robot must complete two laps on the track as fast as possible.
The second phase is played in rounds, with two teams competing at once in pursuit-mode. Only the fastest teams will compete in the second phase. The winning teams move into the next round and consecutively to the final.
A team is typically composed of a maximum of six elements, but can integrate extra elements by paying an additional amount per element.
A single institution may register multiple teams. Teams representing educational institutions should be mainly formed by students from this institution but may include teachers or former students.
Rules
Coordinating Team
Armando Sousa, FEUP/INESCTEC
Artur Pereira, UA, artur@ua.pt
José Augusto Carvalho, IPB, jac@ipb.pt
 The RS Components Middle Size League is an official league of RoboCup. Two (soccer) teams made up of five autonomous robots, with dimensions up to 80 cm in height, 52 cm in diameter and 40 kg in weight, play on a field similar to a football field, but smaller in size (18 m x 12 m).
The RS Components Middle Size League is an official league of RoboCup. Two (soccer) teams made up of five autonomous robots, with dimensions up to 80 cm in height, 52 cm in diameter and 40 kg in weight, play on a field similar to a football field, but smaller in size (18 m x 12 m).

 In the 2D Simulation League, two teams of 11 simulated autonomous software programs (called agents) play soccer in a two-dimensional virtual soccer stadium represented by a central server, called SoccerServer. This server knows everything about the game, i.e. the current position of all players and the ball, the physics and so on.
In the 2D Simulation League, two teams of 11 simulated autonomous software programs (called agents) play soccer in a two-dimensional virtual soccer stadium represented by a central server, called SoccerServer. This server knows everything about the game, i.e. the current position of all players and the ball, the physics and so on. 
 The 3D Simulation competition increases the realism of the simulated environment used in the 2D Simulation League by adding an extra dimension and more complex physics. The virtual robot used in the 3D simulator is based on the Nao humanoid robot from Aldebaran robotics, the robot that is used in the Standard Platform League since 2008.
The 3D Simulation competition increases the realism of the simulated environment used in the 2D Simulation League by adding an extra dimension and more complex physics. The virtual robot used in the 3D simulator is based on the Nao humanoid robot from Aldebaran robotics, the robot that is used in the Standard Platform League since 2008.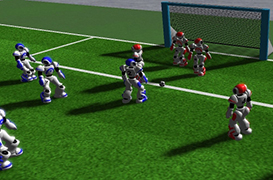
 In the Standard Platform League, soccer is played with a standardized robot platform, i.e. all teams compete with identical robots and only differ in the software they developed. The robots operate in a fully autonomous way, such that there is no external control by humans or computers. However, the robots can communicate with their teammates and receive the decisions of the referee via wireless communication.
In the Standard Platform League, soccer is played with a standardized robot platform, i.e. all teams compete with identical robots and only differ in the software they developed. The robots operate in a fully autonomous way, such that there is no external control by humans or computers. However, the robots can communicate with their teammates and receive the decisions of the referee via wireless communication.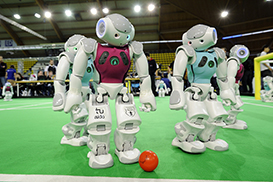
 FreeBots is a competition challenging the research and development community, worldwide, to present their research results in the form of a technical presentation and a public demo. The scope of the demos encompasses physical robots (one or more), mobile or not, land, aquatic or aerial. The acceptance of teams/demos may be limited due to the availability of technical conditions at the site.
FreeBots is a competition challenging the research and development community, worldwide, to present their research results in the form of a technical presentation and a public demo. The scope of the demos encompasses physical robots (one or more), mobile or not, land, aquatic or aerial. The acceptance of teams/demos may be limited due to the availability of technical conditions at the site. 


 The Robot@Factory aims to recreate the challenges and difficulties that an autonomous robot faces when used in a factory. This factory consists of a supply warehouse, a warehouse of finished product and eight processing machines.
The Robot@Factory aims to recreate the challenges and difficulties that an autonomous robot faces when used in a factory. This factory consists of a supply warehouse, a warehouse of finished product and eight processing machines.

