 A prova de Condução Autónoma representa um desafio técnico de média complexidade no qual um robô móvel e autónomo deve percorrer um percurso ao longo de uma pista fechada, que apresenta semelhanças marcantes com a condução de um veículo automóvel numa estrada convencional.
A prova de Condução Autónoma representa um desafio técnico de média complexidade no qual um robô móvel e autónomo deve percorrer um percurso ao longo de uma pista fechada, que apresenta semelhanças marcantes com a condução de um veículo automóvel numa estrada convencional.
A pista utilizada tenta reproduzir, em certa medida, um cenário real, embora a competição decorra num ambiente estruturado. A pista, em formato de 8, simula uma estrada com duas vias à qual foram adicionados uma passadeira com um par de painéis semafóricos (um em cada sentido), um túnel, uma zona de obras, um obstáculo, sinais de trânsito e uma área de estacionamento com dois lugares em que um deles está ocupado. A posição do obstáculo na pista e a posição livre nessa área são dados desconhecidos para o robô no início da sua prova.
A competição desenvolve-se em três fases, realizadas em três dias consecutivos, com um aumento progressivo da complexidade efetuado através da adição de novos desafios. Em todas as 3 fases os robôs partem da passadeira após o reconhecimento do sinal "seguir em frente" exibido no painel semafórico e evoluem autonomamente na pista executando duas voltas completas.
Além da identificação do sinal exibido pelo painel semafórico, a primeira fase requer apenas o controlo do movimento do robô ao longo do percurso, não sendo utilizada nesta fase nem o túnel, nem o obstáculo nem a zona de obras. O robô deverá executar duas voltas completas à pista o mais depressa possível.
A segunda fase exige que o robô seja capaz de identificar um de 5 sinais diferentes exibidos pelo painel semafórico e que reaja em conformidade. Os sinais, mostrados através de um ecrã TFT de 17", podem indicar que o robô deve parar, seguir em um de dois sentidos (virar à esquerda ou ir em frente), que a sua prova terminou, ou que deve iniciar a manobra de estacionamento. Na segunda fase os robôs também têm que lidar com um obstáculo, que ocupa uma das faixas, e que está localizado numa posição desconhecida. O obstáculo deve ser detetado e o robô deve evitá-lo seguindo pela outra faixa, mas sem sair da pista.
Finalmente, na terceira fase são adicionados mais dois problemas: um túnel que cobre uma parte do caminho e uma zona de pista não estruturada designada por zona de obras. O túnel influencia significativamente as condições de luz, o que tem como consequência uma alteração do modo como o robô navega nessa zona da pista. A zona de obras é um desvio da trajetória inicial que é desconhecido à priori. O novo percurso é marcado através de cones coloridos (laranja e branco semelhantes aos utilizados nas estradas, mas de menor dimensão), unidos através de uma fita de plástico com listas vermelhas e brancas. Nesta zona, o robô deve deixar a faixa inicial e seguir pelo novo caminho sem tocar em qualquer dos elementos que o delimita, e reentrar na pista onde a zona de obras termina.
A partir de 2011 foi introduzida uma variante simplificada da competição, designada por CLASSE ROOKIE; esta versão da competição terá duas fases:
A primeira fase consiste numa prova de velocidade em que o robô terá que dar duas voltas à pista no mais curto espaço de tempo.
A segunda fase, onde apenas competirão as equipas mais rápidas da primeira fase, será disputada por mangas com duas equipas a competir em simultâneo no modo de perseguição. As equipas vencedoras passam à manga seguinte consecutivamente até à final.
Uma equipa é tipicamente constituída por um máximo de 6 elementos e poderá integrar mais elementos, mediante o pagamento de uma verba adicional por elemento.
Poderá inscrever-se mais do que uma equipa proveniente da mesma instituição. As equipas que representem instituições de ensino devem ser constituídas maioritariamente por alunos dessa instituição, podendo contudo incluir professores ou mesmo antigos alunos.
Regras
Equipa Responsável
Armando Sousa, FEUP/INESCTEC
Artur Pereira, UA, artur@ua.pt
José Augusto Carvalho, IPB, jac@ipb.pt
 A liga de RS Components Futebol Robótico Médio, Middle Size League em inglês, é uma liga oficial do RoboCup. Duas equipas com 5 robots completamente autónomos, cujas dimensões vão até 80 cm de altura, 52 cm de diâmetro e 40 Kg de peso, defrontam-se num campo semelhante ao de futebol de 11 humano, mas com um tamanho mais reduzido (18mx12m).
A liga de RS Components Futebol Robótico Médio, Middle Size League em inglês, é uma liga oficial do RoboCup. Duas equipas com 5 robots completamente autónomos, cujas dimensões vão até 80 cm de altura, 52 cm de diâmetro e 40 Kg de peso, defrontam-se num campo semelhante ao de futebol de 11 humano, mas com um tamanho mais reduzido (18mx12m).

 Na Liga de Simulação 2D, duas equipas de 11 programas de software autónomos (chamados de agentes, em que cada um deles simula o comportamento de um jogador) jogam futebol num estádio de futebol bidimensional virtual representado por um servidor central, chamado SoccerServer. Este servidor tem conhecimento de tudo o que se passa no jogo, ou seja, a posição atual de todos os jogadores e da bola, o comportamento físico e assim por diante.
Na Liga de Simulação 2D, duas equipas de 11 programas de software autónomos (chamados de agentes, em que cada um deles simula o comportamento de um jogador) jogam futebol num estádio de futebol bidimensional virtual representado por um servidor central, chamado SoccerServer. Este servidor tem conhecimento de tudo o que se passa no jogo, ou seja, a posição atual de todos os jogadores e da bola, o comportamento físico e assim por diante.
 A competição da Liga de Simulação 3D aumenta o realismo do ambiente simulado usado na Liga de Simulação 2D, adicionando a terceira dimensão ao ambiente gráfico e um comportamento físico mais complexo. O robot virtual usado no simulador 3D é basado no robô humanóide NAO (da Aldebaran Robotics), o mesmo usado na Liga de Plataformas Padrão (SPL) desde 2008.
A competição da Liga de Simulação 3D aumenta o realismo do ambiente simulado usado na Liga de Simulação 2D, adicionando a terceira dimensão ao ambiente gráfico e um comportamento físico mais complexo. O robot virtual usado no simulador 3D é basado no robô humanóide NAO (da Aldebaran Robotics), o mesmo usado na Liga de Plataformas Padrão (SPL) desde 2008.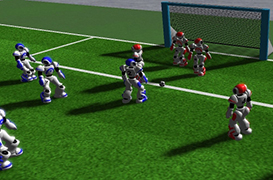
 Na Liga de Plataformas Padrão (Standard Platform League – SPL, em inglês), o futebol é jogado com uma plataforma robótica padrão, ou seja, todas as equipas competem com robôs idênticos, que diferem apenas no software desenvolvido para estes pelas equipas. Os robôs operaram de forma totalmente autónoma, de tal modo que não existe nenhum controlo externo por humanos ou computadores. No entanto, os robôs podem comunicar com os seus companheiros de equipa e receber as decisões do árbitro através de comunicações sem fios.
Na Liga de Plataformas Padrão (Standard Platform League – SPL, em inglês), o futebol é jogado com uma plataforma robótica padrão, ou seja, todas as equipas competem com robôs idênticos, que diferem apenas no software desenvolvido para estes pelas equipas. Os robôs operaram de forma totalmente autónoma, de tal modo que não existe nenhum controlo externo por humanos ou computadores. No entanto, os robôs podem comunicar com os seus companheiros de equipa e receber as decisões do árbitro através de comunicações sem fios.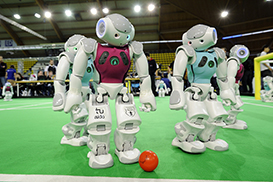
 O FreeBots é uma competição que pretende desafiar a comunidade de investigação e desenvolvimento, a nível mundial, a apresentar os seus resultados de investigação, sob a forma de uma apresentação técnica e de uma demonstração pública. O âmbito das demonstrações abrange robôs físicos (um ou mais), móveis ou não, terrestres, aquáticos ou aéreos. A aceitação de equipas / demonstrações pode ser limitada, devido à disponibilidade de condições técnicas no local.
O FreeBots é uma competição que pretende desafiar a comunidade de investigação e desenvolvimento, a nível mundial, a apresentar os seus resultados de investigação, sob a forma de uma apresentação técnica e de uma demonstração pública. O âmbito das demonstrações abrange robôs físicos (um ou mais), móveis ou não, terrestres, aquáticos ou aéreos. A aceitação de equipas / demonstrações pode ser limitada, devido à disponibilidade de condições técnicas no local.


 O Robot@Factory procura recriar um problema inspirado nos desafios que um robô autónomo terá de enfrentar durante a sua utilização numa fábrica. Esta fábrica é constituída por um armazém de aprovisionamento, um armazém de produto final e oito máquinas de processamento.
O Robot@Factory procura recriar um problema inspirado nos desafios que um robô autónomo terá de enfrentar durante a sua utilização numa fábrica. Esta fábrica é constituída por um armazém de aprovisionamento, um armazém de produto final e oito máquinas de processamento.

